
produkter Kategori
- FM Transmitter
- 0-50w 50w-1000w 2kw-10kw 10kw +
- TV-sender
- 0-50w 50-1kw 2kw-10kw
- FM-antenne
- TV-antenne
- antenne tilbehør
- Kabel Connector strøm Splitter Dummy Load
- RF Transistor
- Strømforsyning
- Audio utstyr
- DTV Front End utstyr
- Link System
- STL system Mikrobølgeovn Link system
- FM-radio
- Styrkemåler
- andre produkter
- Spesielt for Coronavirus
Produkter Tags
Fmuser nettsteder
- es.fmuser.net
- it.fmuser.net
- fr.fmuser.net
- de.fmuser.net
- af.fmuser.net -> Afrikaans
- sq.fmuser.net -> albansk
- ar.fmuser.net -> arabisk
- hy.fmuser.net -> armensk
- az.fmuser.net -> aserbajdsjansk
- eu.fmuser.net -> baskisk
- be.fmuser.net -> hviterussisk
- bg.fmuser.net -> Bulgarian
- ca.fmuser.net -> katalansk
- zh-CN.fmuser.net -> Kinesisk (forenklet)
- zh-TW.fmuser.net -> Kinesisk (tradisjonell)
- hr.fmuser.net -> Kroatisk
- cs.fmuser.net -> tsjekkisk
- da.fmuser.net -> dansk
- nl.fmuser.net -> Nederlandsk
- et.fmuser.net -> estisk
- tl.fmuser.net -> filippinsk
- fi.fmuser.net -> finsk
- fr.fmuser.net -> French
- gl.fmuser.net -> galisisk
- ka.fmuser.net -> Georgisk
- de.fmuser.net -> tysk
- el.fmuser.net -> gresk
- ht.fmuser.net -> haitisk kreolsk
- iw.fmuser.net -> hebraisk
- hi.fmuser.net -> hindi
- hu.fmuser.net -> Ungarsk
- is.fmuser.net -> islandsk
- id.fmuser.net -> indonesisk
- ga.fmuser.net -> Irsk
- it.fmuser.net -> Italiensk
- ja.fmuser.net -> japansk
- ko.fmuser.net -> koreansk
- lv.fmuser.net -> lettisk
- lt.fmuser.net -> litauisk
- mk.fmuser.net -> makedonsk
- ms.fmuser.net -> malaysisk
- mt.fmuser.net -> maltesisk
- no.fmuser.net -> norsk
- fa.fmuser.net -> persisk
- pl.fmuser.net -> polsk
- pt.fmuser.net -> portugisisk
- ro.fmuser.net -> rumensk
- ru.fmuser.net -> russisk
- sr.fmuser.net -> serbisk
- sk.fmuser.net -> Slovakisk
- sl.fmuser.net -> Slovenian
- es.fmuser.net -> spansk
- sw.fmuser.net -> Swahili
- sv.fmuser.net -> svensk
- th.fmuser.net -> Thai
- tr.fmuser.net -> tyrkisk
- uk.fmuser.net -> ukrainsk
- ur.fmuser.net -> urdu
- vi.fmuser.net -> Vietnamesisk
- cy.fmuser.net -> walisisk
- yi.fmuser.net -> Yiddish
Forskjellen mellom absolutte og inkrementelle kodere?
I denne artikkelen vil vi diskutere de forskjellige typene kodere og hvilken koder som kan brukes til hvilken funksjon.
I en forrige leksjon diskuterte vi hva en Encoder er og hvordan den kan implementeres i applikasjonen din. I denne artikkelen skal vi diskutere forskjellen mellom absolutte og inkrementelle kodere og hvilken som kan brukes til hvilken funksjon.
Kodertyper og teknologier
Det er mange typer kodere, men de faller i utgangspunktet inn i to viktigste senseteknikker. De som er:
- Lineær
- Rotary
Innenfor disse kategoriene er det forskjellige målingstyper for kodere som:
- Absolutt
- Trinnvis
Det finnes også forskjellige elektromekaniske teknologier som:
- Magnetisk
- Optisk
- Induktiv
- Kapasitiv
- Laser
Det er en mengde informasjon angående kodere, og det kan virke vanskelig å hive hodet rundt.
Beskrivelser som roterende eller lineære, optiske og magnetiske, absolutte og inkrementelle.
Vi berører noen få grunnleggende for å hjelpe deg med å forstå hva som er hva og hvorfor.
La oss først bryte disse kategoriene litt ned og forklare et par av de mange konfigurasjonene.
1. Lineær koder
For det første bruker Linear Encoder en svinger for å måle avstanden mellom to punkter. Disse koderne kan bruke en stang eller en kabel som kjøres mellom kodetransduseren og gjenstanden som skal måles for bevegelse.
Når objektet beveger seg, skaper transduserens data samlet fra stangen eller kabelen et utgangssignal som er lineært med objektets bevegelse.
Når avstanden er målt, bruker Linear Encoder denne informasjonen til å bestemme objektets plassering.
Et eksempel på hvor en Linear Encoder kan brukes er for en CNC fresemaskin der nøyaktige bevegelsesmålinger er nødvendige for nøyaktighet i fremstillingen.
Lineære kodere kan være "Absolute" eller "Incremental". Vi vil berøre absolutte og inkrementelle målinger litt senere i denne artikkelen.
2. Roterende (aksel) koder
En Rotary Encoder samler inn data og gir tilbakemeldinger basert på rotasjonen av et objekt eller med andre ord, en roterende enhet.
Rotary Encoders kalles noen ganger “Shaft Encoders”. Denne kodertypen kan konvertere et objekts vinkelposisjon eller bevegelse basert på rotasjonen av skaftet, avhengig av målingstypen som brukes.
“Absolute Rotary Encoders” kan måle “vinkel” -posisjoner mens “Incremental Rotary Encoders” kan måle ting som avstand, hastighet og posisjon.
Rotary Encoders brukes innen en lang rekke bruksområder som datamaskininngangsenheter som mus og styrekuler samt robotikk.
Som tidligere nevnt kan roterende eller akselkodere være “Absolutt” eller “Trinnvis”.
3. Posisjonskoder
Den neste koderen, som er en "Position" Encoder, brukes til å bestemme den mekaniske plasseringen til et objekt. Denne mekaniske stillingen er en "absolutt posisjon".
De kan også brukes til å bestemme en endring i posisjon mellom koderen og objektet også. Endringen i posisjon i forhold til objektet og koderen vil være en inkrementell endring.
Posisjonskodere er mye brukt i den industrielle arenaen for å registrere plasseringen av verktøy og posisjonering i flere akser.
Posisjonskoderen kan også være absolutt eller inkrementell.
4. Optisk koder
“Optiske” kodere tolker data i lyspulser som deretter kan brukes til å bestemme ting som posisjon, retning og hastighet.
Skaftet roterer en plate med ugjennomsiktige segmenter som representerer et bestemt mønster. Disse koderne kan bestemme bevegelsen til et objekt for "roterende" eller "aksling" applikasjoner mens de bestemmer nøyaktig posisjon i "lineære" funksjoner.
Optiske kodere brukes i forskjellige applikasjoner som skrivere, CNC fresemaskiner og robotikk.
Igjen kan disse koderne være absolutte eller inkrementelle.
Etter å ha forklart hovedgruppene, ser du kanskje et mønster.
Alle koderne gjør i utgangspunktet det samme, produserer et elektrisk signal som deretter kan oversettes til posisjon, hastighet, vinkel, etc.
Absolutt koder vs. inkrementell koder
Nå som vi har delt ned hovedgruppene, la oss diskutere forskjellen mellom absolutte og inkrementelle målinger.
For å diskutere forskjellen mellom absolutte og inkrementelle målinger, bruker vi typen Rotary Encoder som eksempel.
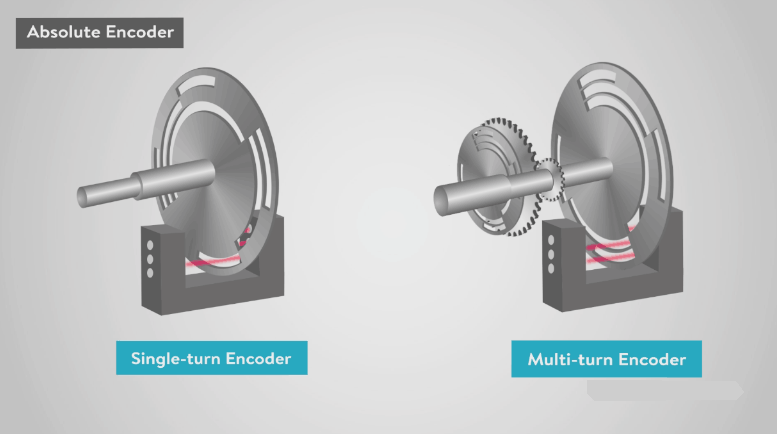
I en "Absolutt" målingstypekoder som brukes i rotasjon, brukes en slisset plate på en sjakt sammen med en stasjonær pickup-enhet. Når akselen roterer produseres et unikt kodemønster. Dette betyr at hver posisjon på akselen har et mønster og dette mønsteret brukes til å bestemme den nøyaktige plasseringen.
Hvis strømmen til koderen gikk tapt og akselen ble rotert, når kraften gjenopptas, vil koderen registrere den absolutte posisjonen som demonstrert av det unike mønsteret som sendes av platen og mottatt av pickupen.
Denne typen måling er å foretrekke i applikasjoner som krever stor grad av sikkerhet, for eksempel når sikkerhet er et primært anliggende. Fordi koderen til enhver tid kjenner til sin definitive posisjon basert på det unike mønsteret som er produsert.
Absolutte målingskodere kan være
- Enkelt sving
or
- Flersving
“En-sving” -kodere brukes til måling av kort avstand, mens “fler-sving” vil være mer egnet for lengre avstander og mer komplekse posisjoneringskrav.
For inkrementelle målingskodere opprettes utgangssignalet hver gang akselen roterer en målt mengde. Det utsignalet blir deretter tolket basert på antall signaler per revolusjon.
Den trinnvise koderen begynner å telle på null når den er slått på. I motsetning til den absolutte koderen, er det ingen garantier angående stillingen.
Fordi den inkrementelle koderen begynner å telle ved null ved oppstart eller strømforstyrrelse, er det nødvendig å bestemme et referansepunkt for alle oppgaver som krever posisjonering.
Kodere i tellende applikasjoner
I den forrige artikkelen, når du beskriver bruken av en kode for telleres formål, er dette eksemplet et godt eksempel på en inkrementell koding.
Anta at strømmen ikke har blitt avbrutt, og at du har slått på transportøren og plassert maskinen i oppsettmodus.
Når koderen dreier, mottar kontrolleren tellinger. La oss si at telleområdet er 0 til 10000.
Dette er en inkrementell koding, så den absolutte posisjonen er ikke kjent, vi vet bare at en full revolusjon av skaftet registrerer et antall på 10000.
Vi plasserer gjenstanden på transportøren, og så snart inngangsfotoøysensoren oppdager objektet, blir det gjeldende kodertallet fanget. La oss si at tallet er 5232.
Vi vil deretter fange opp tellingen med gjenstanden som kommer ut og blir oppdaget av avgangsfotoøyet. Vi vil si at tallet er 6311. Så for å bestemme antall for full reise, vil vi trekke fra 5232 fra 6311 og bestemme at objektreisen er 1079 teller.
Av dette eksemplet er det åpenbart at vi ikke vet objektets absolutte beliggenhet, vi vet bare at reisetallet fra inngangen til avkjørsel er 1079.
Det forteller oss ikke at objektet er tre centimeter fra avkjørselen, bare inn, etc.
vi vet bare at objektet vil komme inn, en telling vil bli fanget, og objektet vil gå ut og igjen, tellingen som blir fanget.
I tilfelle at vi ikke så objektet som kommer ut fra det tillatte reisetallet, pluss eller minus et dødbånd, vil maskinen feil og prosessen vil stoppe.
Det er mange, mange kodingsvarianter der ute, og vi kan fortsette i timevis om de forskjellige typene.
Forhåpentligvis har vi gitt deg en grunnleggende forståelse av hva som er der ute, og når du kanskje vil velge en bestemt type fremfor den andre.
